Internal models of sensorimotor integration regulate cortical dynamics
Description
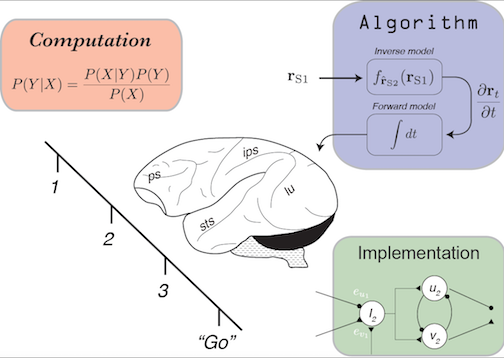
Theoretical considerations and psychophysical studies of sensorimotor integration describe the dynamic regulation of behavior in terms of three computational building blocks: a controller (i.e., inverse model), a predictor (i.e., forward model) and a state estimator (e.g., Bayesian estimator). However, due to the complexity and concurrent engagement of these computations during natural movements, direct evidence that the nervous system establishes inverse and forward models remains elusive. We tackled this problem by designing a sensorimotor timing task in which the function of the inverse and forward models was simple and their deployment was segregated in time. Recording from the frontal cortex of monkeys performing this task revealed the differential contribution of the inverse and forward models to the regulation of the underlying neural dynamics. Our findings provide direct evidence that the nervous system establishes task-relevant internal models to perform Bayesian sensorimotor integration.
Speaker Bio
Mehrdad Jazayeri joined the MIT faculty in January 2013 as an assistant professor in the Department of Brain and Cognitive Sciences and an Investigator in the McGovern Institute. Jazayeri, who is originally from Iran, obtained a B.Sc in Electrical Engineering from Sharif University of Technology in Tehran. He received his PhD from New York University, where he studied with J. Anthony Movshon, winning the 2007 Dean’s award for the most outstanding dissertation in the university. After graduating, he was awarded a Helen Hay Whitney fellowship to join the laboratory of Michael Shadlen at the University of Washington, where he was a postdoctoral researcher.